Diffusion fashions like OpenAI’s DALL-E have gotten more and more helpful in serving to brainstorm new designs. People can immediate these techniques to generate a picture, create a video, or refine a blueprint, and are available again with concepts they hadn’t thought-about earlier than.
However do you know that generative synthetic intelligence (GenAI) fashions are additionally making headway in creating working robots? Latest diffusion-based approaches have generated buildings and the techniques that management them from scratch. With or with no consumer’s enter, these fashions could make new designs after which consider them in simulation earlier than they’re fabricated.
A brand new method from MIT’s Pc Science and Synthetic Intelligence Laboratory (CSAIL) applies this generative know-how towards bettering people’ robotic designs. Customers can draft a 3D mannequin of a robotic and specify which elements they’d wish to see a diffusion mannequin modify, offering its dimensions beforehand. GenAI then brainstorms the optimum form for these areas and exams its concepts in simulation. When the system finds the fitting design, it can save you after which fabricate a working, real-world robotic with a 3D printer, with out requiring extra tweaks.
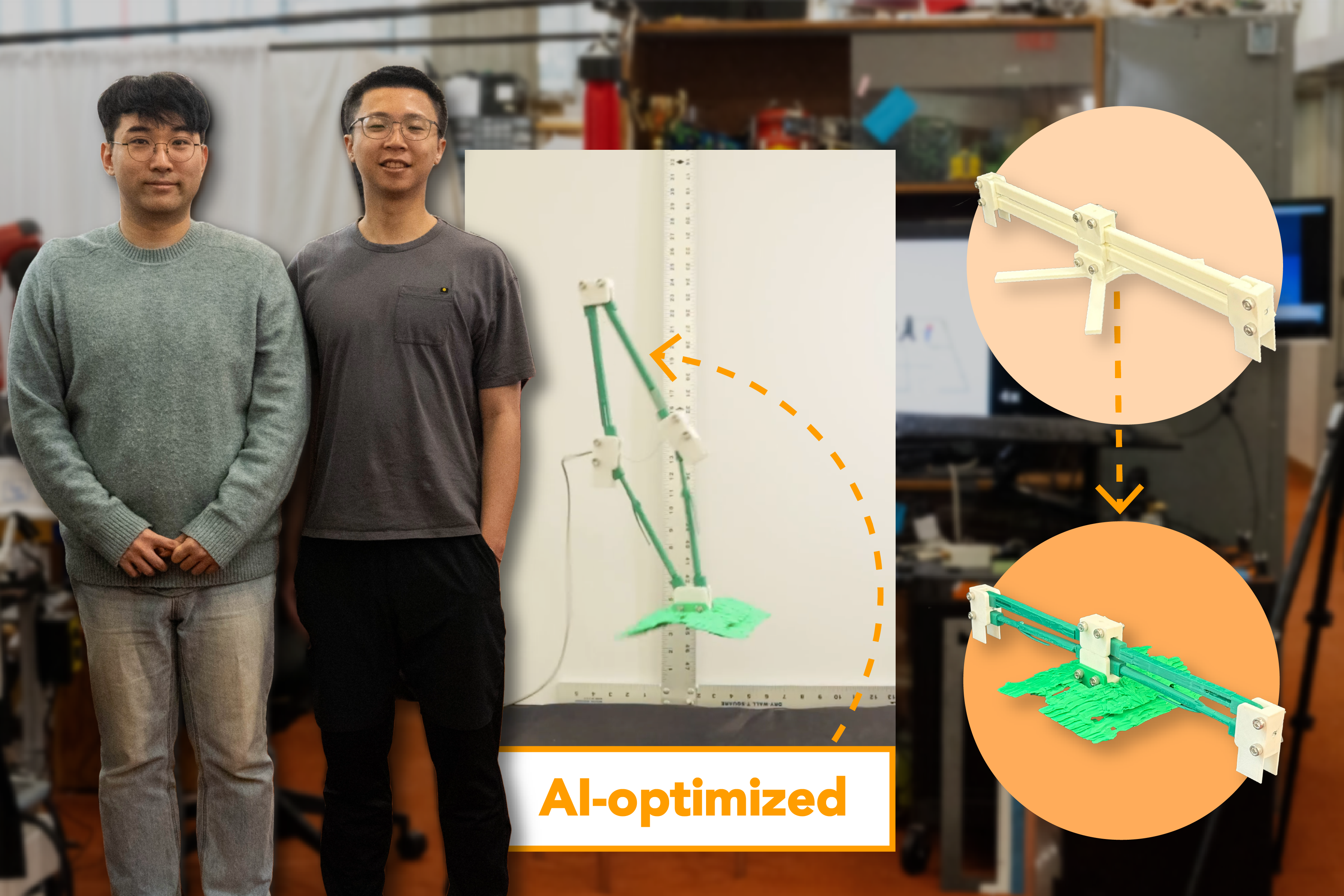
The researchers used this method to create a robotic that leaps up a mean of roughly 2 ft, or 41 p.c larger than the same machine they created on their very own. The machines are practically an identical in look: They’re each made from a sort of plastic referred to as polylactic acid, and whereas they initially seem flat, they spring up right into a diamond form when a motor pulls on the wire connected to them. So what precisely did AI do in a different way?
A more in-depth look reveals that the AI-generated linkages are curved, and resemble thick drumsticks (the musical instrument drummers use), whereas the usual robotic’s connecting elements are straight and rectangular.
Higher and higher blobs
The researchers started to refine their leaping robotic by sampling 500 potential designs utilizing an preliminary embedding vector — a numerical illustration that captures high-level options to information the designs generated by the AI mannequin. From these, they chose the highest 12 choices based mostly on efficiency in simulation and used them to optimize the embedding vector.
This course of was repeated 5 instances, progressively guiding the AI mannequin to generate higher designs. The ensuing design resembled a blob, so the researchers prompted their system to scale the draft to suit their 3D mannequin. They then fabricated the form, discovering that it certainly improved the robotic’s leaping skills.
The benefit of utilizing diffusion fashions for this job, in response to co-lead creator and CSAIL postdoc Byungchul Kim, is that they’ll discover unconventional options to refine robots.
“We wished to make our machine soar larger, so we figured we might simply make the hyperlinks connecting its elements as skinny as attainable to make them mild,” says Kim. “Nonetheless, such a skinny construction can simply break if we simply use 3D printed materials. Our diffusion mannequin got here up with a greater concept by suggesting a singular form that allowed the robotic to retailer extra power earlier than it jumped, with out making the hyperlinks too skinny. This creativity helped us be taught concerning the machine’s underlying physics.”
The crew then tasked their system with drafting an optimized foot to make sure it landed safely. They repeated the optimization course of, finally selecting the best-performing design to connect to the underside of their machine. Kim and his colleagues discovered that their AI-designed machine fell far much less usually than its baseline, to the tune of an 84 p.c enchancment.
The diffusion mannequin’s capability to improve a robotic’s leaping and touchdown abilities suggests it may very well be helpful in enhancing how different machines are designed. For instance, an organization engaged on manufacturing or family robots might use the same method to enhance their prototypes, saving engineers time usually reserved for iterating on these modifications.
The steadiness behind the bounce
To create a robotic that might soar excessive and land stably, the researchers acknowledged that they wanted to strike a steadiness between each targets. They represented each leaping top and touchdown success charge as numerical information, after which skilled their system to discover a candy spot between each embedding vectors that might assist construct an optimum 3D construction.
The researchers be aware that whereas this AI-assisted robotic outperformed its human-designed counterpart, it might quickly attain even larger new heights. This iteration concerned utilizing supplies that had been suitable with a 3D printer, however future variations would soar even larger with lighter supplies.
Co-lead creator and MIT CSAIL PhD pupil Tsun-Hsuan “Johnson” Wang says the challenge is a jumping-off level for brand new robotics designs that generative AI might assist with.
“We need to department out to extra versatile targets,” says Wang. “Think about utilizing pure language to information a diffusion mannequin to draft a robotic that may decide up a mug, or function an electrical drill.”
Kim says {that a} diffusion mannequin might additionally assist to generate articulation and ideate on how elements join, doubtlessly bettering how excessive the robotic would soar. The crew can be exploring the potential of including extra motors to regulate which path the machine jumps and maybe enhance its touchdown stability.
The researchers’ work was supported, partially, by the Nationwide Science Basis’s Rising Frontiers in Analysis and Innovation program, the Singapore-MIT Alliance for Analysis and Know-how’s Mens, Manus and Machina program, and the Gwangju Institute of Science and Know-how (GIST)-CSAIL Collaboration. They offered their work on the 2025 Worldwide Convention on Robotics and Automation.










{kind=link}